


I started learning Arduino back in July of this year (2019). On August 15th after 20 days I visited for the first time Stavros Niarchos Foundation and I applied the knowledge acquired there for the very first time. This article refers to the Parking Position detectors in the parking of Stavros Niarchos Foundation. It is a materialization of my own of the way they are supposed to work.
One may wonder why do they have used two detectors and not only one over the car. I suppose they have done this for debugging each parking position sensors because if you check regularly 2000 parking positions in a 4-stores parking then you have to employ a lot of personnel but with this materialization the parking position's sensors say to you "we are ill - come and cure us").
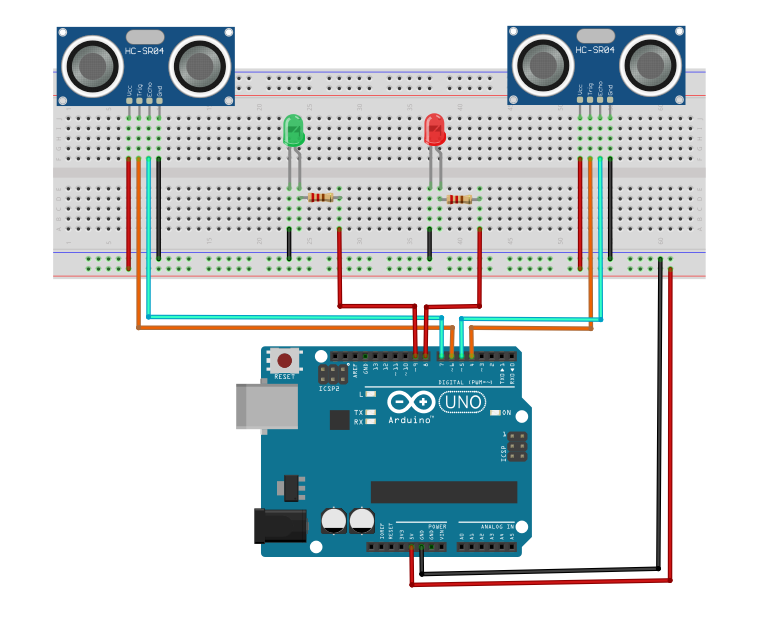
Here is the schematic:
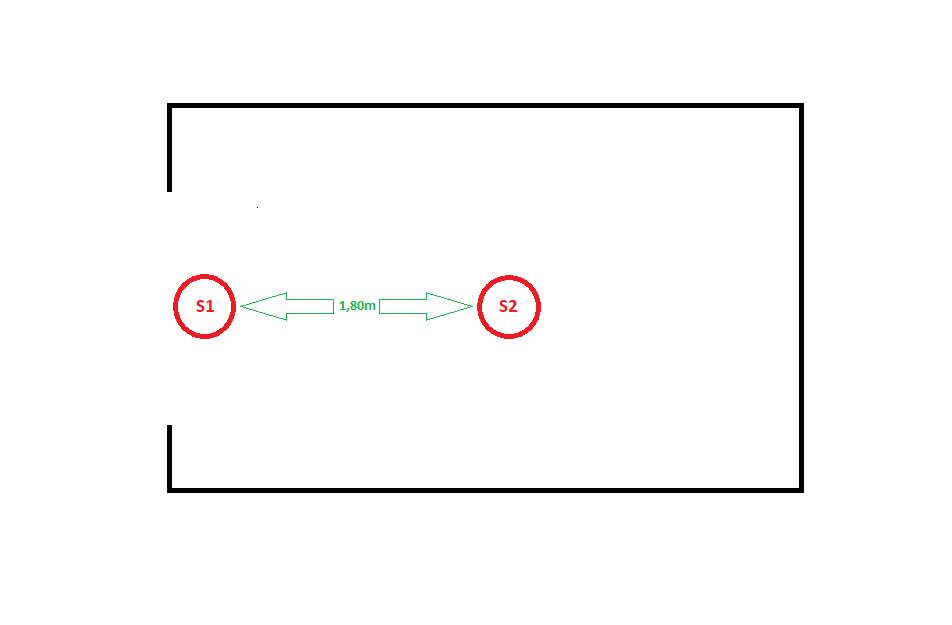
The parking position sensors are located almost 2,40m over the floor and have a distance between them of about 1,80m in the x-axis of the parking position and are located in the middle of the y-axis in each related position. We have something like this:
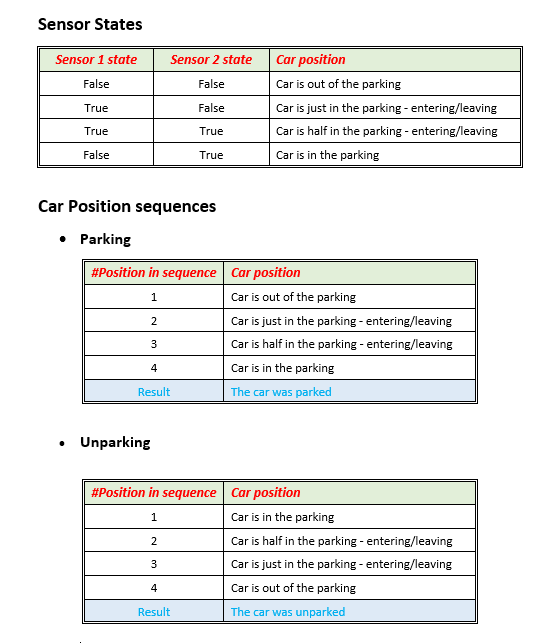
There is a timer and triggers each sensor in regular time distances and if the space distance of a sensor to the closest object is less than 120cm (in my materialization) then it sets its state to true else it sets its state to false. When the car is out S1=False and S2=False. When it is just entering then S1=True and S2=False. When it is half in the parking position S1=True and S2=True. When the car is full in the parking then S1=False and S2=True. By getting the sequence of the states we understand if the car was parked or the car was unparked. If none of this has happened (the sequence of the states do not correspond to none of "has parked" or "has unparked" statuses) and it hasn't got in a known status within two minutes then the personnel is being notified (I suppose).
Here are the states of the sensors with related meanings and the result statuses:
When the car is unparked the Green LED lights indicating an empty position and when the car is parked the Red LED lights indicating a non empty position.
Here is the code (in B4R) :
#Region Project Attributes
#AutoFlushLogs: True
#CheckArrayBounds: True
#StackBufferSize: 300
#End Region
Sub Process_Globals
'These global variables will be declared once when the application starts.
'Public variables can be accessed from all modules.
Public Serial1 As Serial
Public triggerpin1 As Pin
Public echopin1 As Pin
Public pulseduration1 As Double
Public triggerpin2 As Pin
Public echopin2 As Pin
Public pulseduration2 As Double
Dim pinRed As Pin
Dim pinGreen As Pin
Dim bCurrentState1 As Boolean
Dim bCurrentState2 As Boolean
Dim bPreviousState1 As Boolean = False
Dim bPreviousState2 As Boolean = False
Dim iPointer As Int
Dim States1Logged(4), States2Logged(4) As Boolean
Dim Parking1(4) As Boolean, UnParking1(4) As Boolean
Dim Parking2(4) As Boolean, UnParking2(4) As Boolean
Dim tm As Timer
Dim tm2 As Timer
End Sub
Private Sub AppStart
Serial1.Initialize(115200)
Log("AppStart")
iPointer = 0
tm.Initialize("tm_Tick", 500)
tm.Enabled = True
tm2.Initialize("tm2_Tick", 120000)
triggerpin1.Initialize(4, triggerpin1.MODE_OUTPUT)
triggerpin2.Initialize(6, triggerpin2.MODE_OUTPUT)
echopin1.Initialize(5, echopin1.MODE_INPUT)
echopin2.Initialize(7, echopin2.MODE_INPUT)
pinRed.Initialize(8, pinRed.MODE_OUTPUT)
pinGreen.Initialize(9, pinRed.MODE_OUTPUT)
'First sensor parking sequence
Parking1(0) = False: Parking1(1) = True: Parking1(2) = True: Parking1(3) = False
'Second sensor parking sequence
Parking2(0) = False: Parking2(1) = False: Parking2(2) = True: Parking2(3) = True
'First sensor unparking sequence
UnParking1(0) = False: UnParking1(1) = True: UnParking1(2) = True: UnParking1(3) = False
'Second sensor unparking sequence
UnParking2(0) = True: UnParking2(1) = True: UnParking2(2) = False: UnParking2(3) = False
End Sub
Private Sub tm_Tick
LogSensor1
LogSensor2
LogStateAndLightProperPIN
End Sub
Private Sub tm2_Tick
If LightUpProperLED = False Then
'Inform me that the sensors have a problem
tm.Enabled = False
End If
End Sub
Private Sub LogSensor1
Dim distance1 As Double
'Begin trigger
triggerpin1.DigitalWrite(True)
Log("Begin trigger 1")
'Trigger Off
triggerpin1.DigitalWrite(False)
'Distance proportional to pulse duration received on echo1 Pin
RunNative("pulseins1",echopin1.PinNumber)
'distance=(0.5*pulsduration)/29.1
Log("Pulse duration: ", pulseduration1)
distance1=(0.0340*0.5*pulseduration1)
bCurrentState1 = (distance1<120)
End Sub
#if C
void pulseins1 (B4R::Object* o) {
b4r_main::_pulseduration1 = pulseIn(o->toULong(),HIGH);
}
#End if
Private Sub LogSensor2
Dim distance2 As Double
'Begin trigger
triggerpin2.DigitalWrite(True)
Log("Begin trigger 2")
'Trigger Off
triggerpin2.DigitalWrite(False)
'Distance proportional to pulse duration received on echo2 Pin
RunNative("pulseins2",echopin2.PinNumber)
'distance=(0.5*pulsduration)/29.2
Log("Pulse duration: ", pulseduration2)
distance2=(0.0340*0.5*pulseduration2)
bCurrentState2 = (distance2<120)
End Sub
#if C
void pulseins2 (B4R::Object* o) {
b4r_main::_pulseduration2 = pulseIn(o->toULong(),HIGH);
}
#End if
Sub LogStateAndLightProperPIN
'If the states have not changed do not log anything
If bPreviousState1 = bCurrentState1 And bPreviousState2 = bCurrentState2 Then Return
States1Logged(iPointer) = bCurrentState1
States2Logged(iPointer) = bCurrentState2
bPreviousState1 = bCurrentState1
bPreviousState2 = bCurrentState2
iPointer = iPointer + 1
If iPointer = 4 Then iPointer = 0
LightUpProperLED
End Sub
Private Sub LightUpProperLED As Boolean
Dim iCheck1 As Int = 0
Dim iParking2 As Int = 0
Dim iUnparking2 As Int = 0
Dim bParked As Boolean = False
Dim bUnparked As Boolean = False
For ii = 0 To 3
'We do not need actually the Unparking1 as it is actually the same
If Parking1(ii) = States1Logged((iPointer + ii) Mod 4) Then
iCheck1 = iCheck1 + 1
End If
If Parking2(ii) = States2Logged((iPointer + ii) Mod 4) Then
iParking2 = iParking2 + 1
End If
If UnParking2(ii) = States2Logged((iPointer + ii) Mod 4) Then
iUnparking2 = iUnparking2 + 1
End If
Next
If iCheck1 = 4 Then
'It has pakred or unparked
If iParking2 = 4 Then bParked = True
If iUnparking2 = 4 Then bUnparked = True
Else
'Give the sensors a 2 minutes grace period and then inform me that they are malfunctioning
'The sub is triggered only on a different state logged so the timer will not be constantly enabled and restart
tm2.Enabled = True
End If
Select Case True
Case bParked = False And bUnparked = True
tm2.Enabled = False
pinGreen.DigitalWrite(True)
pinRed.DigitalWrite(False)
Case bParked = True And bUnparked = False
tm2.Enabled = False
pinGreen.DigitalWrite(False)
pinRed.DigitalWrite(True)
Case Else
'Give the sensors a 2 minutes grace period and then inform me that they are malfunctioning
'The sub is triggered only on a different state logged so the timer will not be constantly enabled and restart
tm2.Enabled = True
End Select
Return (bParked Or bUnparked)
End Sub